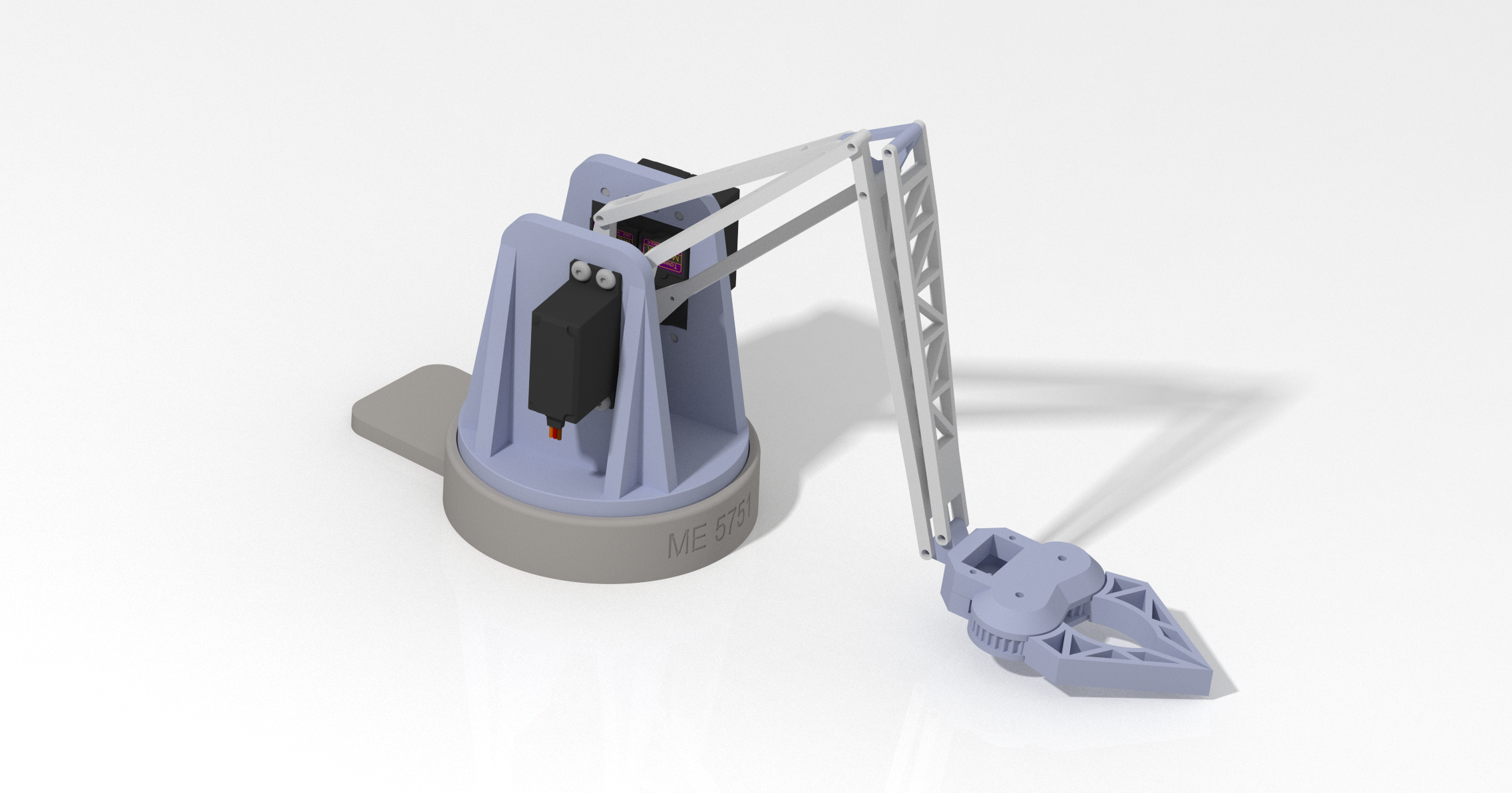
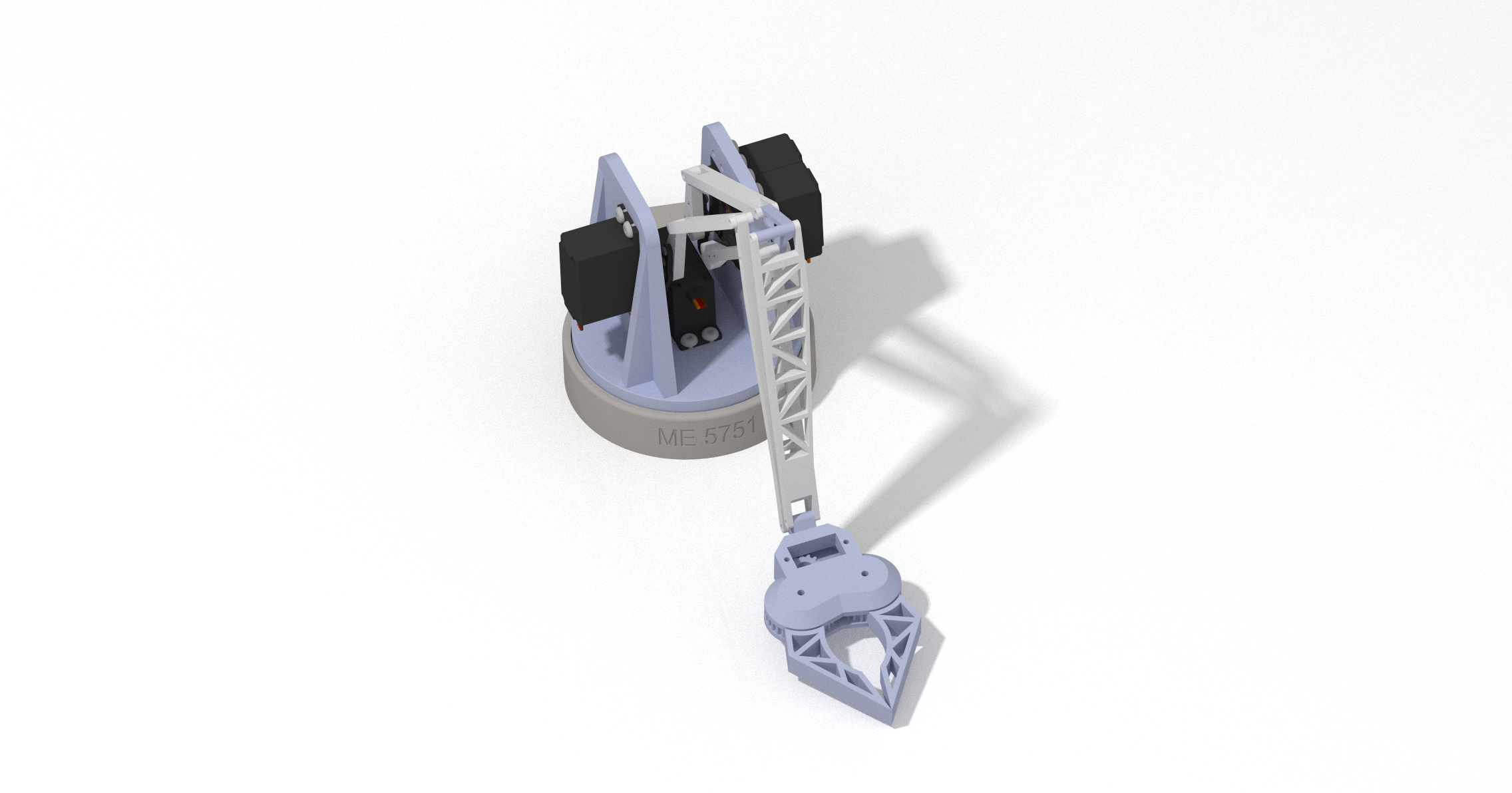
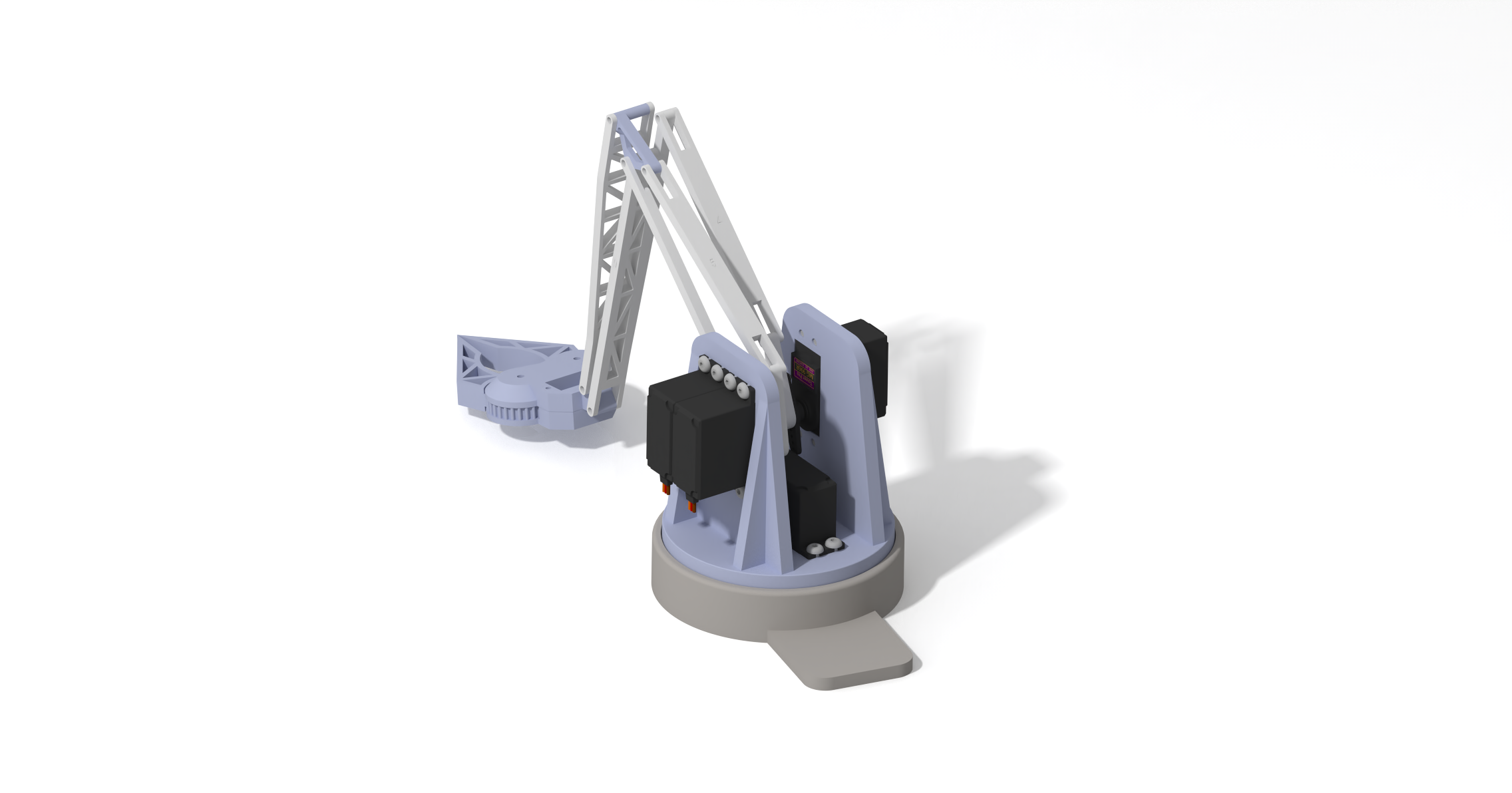
Robotic Arm for Object Pick-and-Place
This robotic arm was developed as part of a hands-on design competition in the ME 5751 course at The Ohio State University. The project’s goal was to create a pre-programmed robotic arm capable of picking up objects from a designated home position and placing them into a container, demonstrating precision, repeatability, and efficiency. The robot operated autonomously during a timed window, showcasing its ability to complete multiple tasks without human intervention once initialized.
The robotic arm utilized servo motors for accurate movement across multiple degrees of freedom. It was programmed to handle various object shapes, including cubes, cylinders, and triangular prisms, with dimensions ranging from 1 to 4 inches. The project required meticulous pre-measurement of object and container coordinates and efficient programming to maximize the number of successful tasks completed within the three-minute time limit.
This competition emphasized applying engineering design principles, optimizing for speed and precision, and integrating hardware with software control. The project reflects both technical skills and problem-solving abilities in robotics and automation.